Trojan Asteroids

Photo by Chris Henry on Unsplash .
Introduction to Gravity
Modern physics is aware of four fundamental forces. The weakest of those is the gravitational force; nonetheless it has great impact on our everyday lives.
Why do we feel it so strongly albeit its weakness? It is neither shielded nor has a finite range. The only other known force which has an infinite range is the electromagnetic force which is responsible for the phenomena of electricity and magnetism, but also for light we see, radio waves and even X-rays. It is also the force which binds atoms together and collects them to form molecules.
The remaining two forces are the strong and the weak forces. (I am sorry, but there doesn’t seem to be a more beautiful name for them; although physicists have invented nice-sounding names for a lot of phenomena, they seem to have failed to invent something better in these cases). Both have only a finite range which is of the order of the atomic nucleus or even less. They play no role for larger distances. There is a mathematical definition of what “finite range” means, but I don’t want to go into that.
For the case we are interested in this post we need a way to model gravity. To do that we consider the framework of mechanics first formulated by Sir Isaac Newton in the 17th century. This is a very accurate framework for gravity in our solar system and is sufficient unless one needs extremely high accuracy.
Orbital Motion
The simplest problem of gravity is the so called “1-body-problem”. It involves a single moving body in the field of a fixed massive body. If the other body is really “fixed”, we must assume that the mass of the moving body is actually zero. That’s fine for e.g. a satellite orbiting Earth. Which forces are involved? The first one is the gravitational force which Newton postulated to be:
M is the mass of the central body, m is the mass of the moving
body, r is the distance and 𝛾 a constant to fix the units which is
commonly called constant of gravity. This expression only gives
the absolute value of the force so far; its direction coincides with
the r vector (the “-” sign tells us that it points in the opposite
direction).
One moment! Didn’t I just require the smaller bodies mass to be negligibly small? So shouldn’t the force be negligible as well? Well, one rule of thumb in physics is always that you should only take limits in the final expression, so let’s keep the mass for a while and only let it vanish in the final expression.
The second force we have to consider is the centrifugal force whose direction coincides again with the radial vector, but now has a positive sign:

v is the tangential velocity of the body, i.e. the component of the
velocity which is perpendicular to r. Graphically the situation
looks as follows:
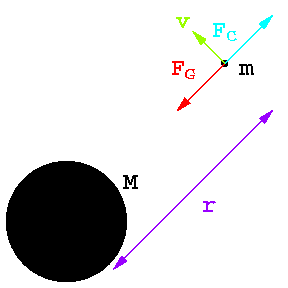
Please note: Neither the forces, nor the distance or the velocity in
the above picture depend on the absolute location of the large
mass. So for the forces (and the quantities they depend on, i.e. the
distance r and the velocity v) it makes no difference where you
put the center of your picture. For them any choice is as good as
another.
Now let’s see what happens if the body is in a circular orbit: This
means that the radius r is constant and does not change with
time. If we draw the above graphic at two different times, one picture
will be a rotated version of the other. The forces along r are still
the same, as is the tangential velocity v. Now we know from Newton’s
equations that if there is no change in a coordinate, the resulting
force must be zero, so the sum of FG and FC must
be equal to zero:
This is actually independent of m as we can divide it out. The
resulting expression yields a relation between M, v and r which
must be fulfilled for a circular orbit. When solving the equation for
v, we get for the absolute value of the tangential velocity.

What happens if v differs from the above value? The resulting curve will no longer be a circle but rather become an ellipse. Something similar happens if the second body is no longer negligibly light, so let’s look into that.
The 2-body Problem
We just examined the 1-body problem above which considered a body
moving in a fixed gravitational field of another body. Now let’s see
what happens once the lighter mass m is not negligibly small. We
now must write down Newton’s equation for the first body m but also
for the second body M as well! Now these two equations will no
longer be independent of each other.
This sounds scary at first, but there is a trick which makes life much simpler: there exists a position in space which is called “center of mass” – or, alternatively, “barycenter” – of the two bodies. It lies somewhere on the line going from one body to the other. We can pretend each one of the two bodies just moves as a single body in the 1-body problem above around that center.
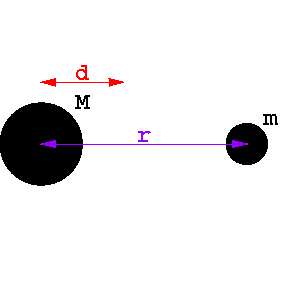
Now let d be the distance from the mass M to the imaginary body in
the center. If we keep this point fixed, we can treat the two other
bodies as being one-body problems with this point being the central
body. We can compute d as follows:

Given this distance, we can again calculate the velocities of the two bodies in a circular orbit:

Note, however that these must now point into opposite directions perpendicular to the distance vector! Exactly like in the 1-body case, we end up with elliptical orbits if the initial velocities are different.
Free Vs Bound Systems
So far we have considered bodies “orbiting” each other, i.e. the bodies stayed at a fixed distance. The cases we only noted in passing (i.e. elliptical orbits) are similar in the sense that there is a maximum distance the bodies can reach. All these cases (when the bodies are no further than a finite distance apart at all times) are called “bound systems”.
Two bodies do not need to form a bound system; if they were bound in any case, we couldn’t even build a space probe which leaves Earth’s orbit. Fortunately, with sufficiently high velocities the two bodies can fly apart from each other without an upper limit. This case is called a “free system”.
The difference lies in the “energy”. In the one-body case it looks like this:
The energy is constant, i.e., we only need to compute it once. It stays the same at later times. We can also use to tell whether the body is bound or free: The energy is the sum of two parts. The first one is the so-called “kinetic energy”, the second one is the so-called “potential energy”. The potential energy is negative, the kinetic energy is positive. If the potential energy is larger, the total energy will be negative and if the kinetic energy is larger, the total energy will be positive. In an elliptic orbit, both the kinetic energy and the potential energy will change individually over the time. Their sum, however, stays constant!
If the total energy is negative, the body is bound and if the kinetic energy is larger, the body is free. This way we can distinguish bound and free systems at any time.
This is actually good news! Above we noticed that in the one- and two-body systems bound states look like circles or ellipses. Computing those is not simple and doing so to distinguish a circular orbit, an elliptic orbit or the path of a free body is quite some work. Computing the energy is much simpler and allows us to decide right away if the body is bound or free.
The 3-body Problem
We started with the 1-body problem, continued with the 2-body problem and guess which problem we are now going to examine? Yes, exactly! However, so far it had been able to solve the problems exactly, i.e. we could in principle predict how the system would look like at any time if we only knew how it looked like at some initial time. If we want we could even compute how it looked like at any earlier time.
Now, if we add a third body, these solutions are no longer available for an arbitrary initial setup. One way to handle this is to write down Newton’s equation in a fixed coordinate system and then solve them numerically i.e. using a computer. There are several methods to do this — one is to assume elliptic orbits and compute their bodies' deviations from elliptic orbits. This method only works well if the true paths really look at least roughly elliptical. It also introduces small systematic errors. This is the method of choice if we want to compute the paths of planets in our solar system, but it doesn’t work for systems of bodies of equal mass whose paths don’t look anything like ellipses.
A more general albeit less accurate technique is to take the system at some time and compute its appearance a little time later. This step is called an “iteration” and works even if bodies have similar masses and have no stable orbits. This method introduces a systematic error which depends on the size of the time step and the specifics used. It works fine if we don’t do too many time steps. Unfortunately, this also means we cannot really tell for sure if a single body in a 3-body system will stay bound or not. Itt may happen that two bodies start to form a stable elliptical orbit and the 3rd body gets shot away! Or the bodies may continue to stay together. We cannot say how the system ends up finally — even if our computation was exact.
There are systems which are known to be stable and stay bound indefinitely. These are important, because with those astronomers can estimate how large the deviations in our solar system may have been in the past couple of billions of years.
Let’s consider the so-called “restricted 3-body system”. We start with a 2-body system with one body being reasonably lighter than the other one. The 3rd body shall be so light its effect on the other two is negligible. Let’s assume the 2 large bodies are in a circular orbit; are there any points where the 3rd body can be placed so that it will stay where you put it?
It turns out that in fact five points of this sort exist. These points are referred to as “Lagrange points” to honor Joseph-Louis Lagrange for his pioneering work “Essai sur le Problème des Trois Corps” (1772 Paris Prize (shared) winner). The exact location of all five points can be found by computing the centrifugal forces together with the gravitational forces which act on the 3rd body. Three points lie on the line connecting the two larger bodies. The other two are positioned such that the 3 bodies form an equilateral triangle:
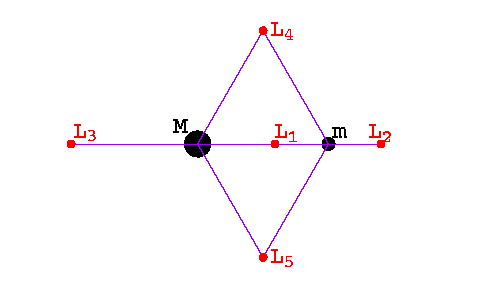
There are peculiarities concerning the Lagrange points: Only the points L4 and L5 are stable! If you put a body at L1, L2 or L3 it will only stay there if you put it exactly at the point and don’t perturb it afterward! However, at L4 and L5 you can even kick it a little harder and the body won’t escape the system! This is what makes the points L4 and L5 so attractive, because they allow for a semi-stable system of three bodies!
In our solar system, we can indeed find several asteroids located at
the points L4 and L5 if we take M to be the
sun and m to be Jupiter. These asteroids are named after characters
in Homer’s Iliad. The current convention in use is to place the Greeks
at the (eastern, preceding) Lagrangian point L4, the
Trojans at L5. There are 3.5 times more Greeks than
Trojans.
In my original tutorial from 1997 I had used a Java applet, but since those are obsolete I am currently rewriting it in Javascript. With it we can study the behavior of the system under different initial conditions.
N-body Systems
The situation for N-body systems (with N being any number larger
than three) is still more complicated than for 3-body systems. These
systems are the ones which are most interesting in
astronomy. Astronomers distinguish between “few-body” and “many-body”
systems. Few body systems are systems with about a dozen of
bodies. Many-body systems consist of several thousands up to millions
of bodies or even more. Examples of the former are our solar system
and open star clusters. Examples of the latter or globular star
clusters, galaxies or even galaxies within super-clusters.
In those cases the central question is about stability. Once set up, will a system still look similar after a few million years? Or a few billion years?
Will We Get Wiped Out?
What about our solar system? It is actually more than 4 billion years old. Apparently, it has stayed more or less stable and no catastrophic event like Earth being shot out of the system has happened since. If you already played around with the trojan app a little, you may have found out that there are numerous cases when the 3rd body gets shot out of the system — the situation would look worse if it had equal mass as the planet — then the planet would get shot out similarly often. So how is it possible that in our solar system everything worked out so nicely? Will it stay that way?
This is also crucial for estimating how probable it is that there are other solar systems similar to ours which may have planets able to house life. This is a playing ground of chaos theory and an active research field.
What About Entire Galaxies?

Just like for few-body systems stability for many-body systems stability is essential, too. Many-body systems in nature are globular clusters, galaxies and even clusters of galaxies. How long do these objects typically stay stable? For galaxies the answer is not as urgent since they may live for several billions of years or even longer than our universe exists. In the case of globular clusters it may turn out that they only live several billions of years. They may shoot out several stars and become more compact before they finally collapse. At the end of their lives they may become black holes or similarly fantastic objects. If we knew how long these objects typically lived, we would even gain an independent idea of how old our universe actually is!

Conclusions
There are quite a few special cases of systems of astronomical interest. We also saw what their relation to open questions in modern research are. I hope that you are able to use the trojan applet and probably learn more. The whole field is still active and with the prospects of manned spaceflights we may be able to learn more about our universe than with computer simulations alone.
References and further reading
I have to thank John Stockton for his reading of an older version of this article and his feedback in 2011.
- For learning mechanics (or anything related to physics) I recommend The Feynman Lectures on Physics. Richard Feynman has the exceptional ability to see and explain the gist of even complex things in a simple and understandable manner.
- While I was a student I liked Mechanik (in German) by Florian Scheck. I don’t know about an English translation, though.
- An oldie but goody is Astronomie mit dem Personal Computer (in German). I don’t know about an English translation.
- The Wikipedia article on Lagrange points is also worth checking out.
- A good (albeit quite technically advanced) review of more techniques and applications of N-body systems is on Scholarpedia.